The V-855 high-speed direct-drive linear modules from PI are for industrial precision automation.
Features
- Long travel (up to 800 mm) with narrow profile (107 mm width)
- Highly dynamic, easy-to-use linear motor with velocities ranging up to 4 minutes/second
- Perfect for gantry systems
- Strong industrial design for a long lifetime
- Permanent load capacity of 600 N
- High-precision incremental or absolute linear encoder available
Linear Motor Stages for High Throughput & Economical Positioning in Precision Industrial Automation
Video Credit: PI (Physik Instrumente) LP
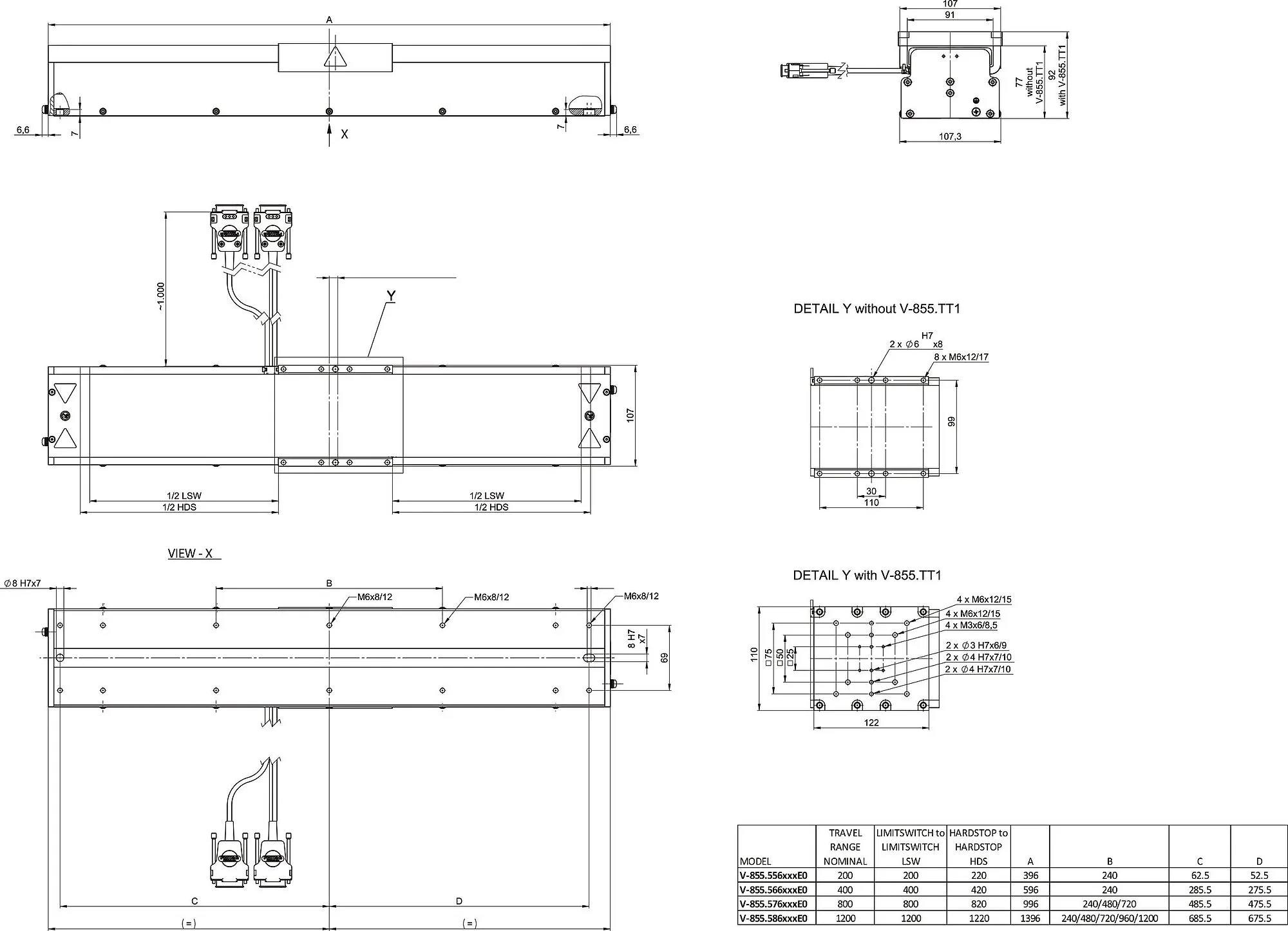
V-855, dimensions in mm. Image Credit: PI (Physik Instrumente) LP
Compact Industrial Design for Applications with Low Power Requirements
For industrial applications, the V-855 is a heavy-duty and highly dynamic linear stage. Its design has been constantly geared to challenging industrial conditions. It is specified by high stiffness and the usage of high-quality components: a 3-phase linear motor, recirculating ball bearing guides, and incremental or absolute linear encoder.
The high resolution of the encoders enables outstanding tracking performance, short settling times, and small tracking errors. The optional motion platform provides flexible assembly options with a triple M6 hole pattern.
Linear Motor with Direct Drive
The availability of 3-phase magnetic direct drives does not use the drivetrain's mechanical components. They transmit the drive force to the motion platform instantly and without friction. The drives reach high accelerations and velocities.
Ironless motors are ideal for positioning tasks with the most significant demands on accuracy because there is no unwanted interaction with the permanent magnets.
This enables smooth running even at the lowest velocities, and simultaneously, there is no vibration at high velocities. Nonlinearity in control behavior has been prevented, and it is possible to control any position efficiently. The drive force could be set freely.
Options
Optional accessory: V-855.TT1 motion platform
Application Fields
- Electronics manufacturing: PCB manufacturing, printed electronics
- Advanced manufacturing: Robotic manipulation and microassembly, industrial inkjet printing
- Test & inspection: Noncontact 2D measurement, position sensor testing, sensor and camera placement for inspection, vibration, and acceleration testing
Specifications
Source: PI (Physik Instrumente) LP
| Motion |
V-855.556023E0 |
V-855.566023E0 |
V-855.576023E0 |
V-855.556211E0 |
V-855.566211E0 |
V-855.576211E0 |
Tolerance |
| Active axes |
X |
X |
X |
X |
X |
X |
|
| Travel range in X |
200 mm |
400 mm |
800 mm |
200 mm |
400 mm |
800 mm |
|
| Acceleration in X, unloaded |
50 m/s² |
50 m/s² |
50 m/s² |
50 m/s² |
50 m/s² |
50 m/s² |
max. |
| Maximum velocity in X, unloaded |
4000 mm/s |
4000 mm/s |
4000 mm/s |
4000 mm/s |
4000 mm/s |
4000 mm/s |
|
| Straightness (Linear crosstalk in Y with motion in X) |
± 8 µm |
± 12 µm |
± 20 µm |
± 8 µm |
± 12 µm |
± 20 µm |
max. |
| Flatness (Linear crosstalk in Z with motion in X) |
± 10 µm |
± 10 µm |
± 10 µm |
± 10 µm |
± 10 µm |
± 10 µm |
max. |
| Pitch (Rotational crosstalk in θY with motion in X) |
± 75 µrad |
± 100 µrad |
± 150 µrad |
± 75 µrad |
± 100 µrad |
± 150 µrad |
max. |
| Yaw (Rotational crosstalk in θZ with motion in X) |
± 125 µrad |
± 150 µrad |
± 200 µrad |
± 125 µrad |
± 150 µrad |
± 200 µrad |
max. |
| Positioning |
V-855.556023E0 |
V-855.566023E0 |
V-855.576023E0 |
V-855.556211E0 |
V-855.566211E0 |
V-855.576211E0 |
Tolerance |
| Integrated sensor |
Absolute linear encoder |
Absolute linear encoder |
Absolute linear encoder |
Incremental linear encoder |
Incremental linear encoder |
Incremental linear encoder |
|
| Bidirectional repeatability in X |
± 1 µm |
± 1 µm |
± 1 µm |
± 1 µm |
± 1 µm |
± 1 µm |
max. |
| Positioning accuracy in X, uncalibrated |
± 10 µm |
± 15 µm |
± 20 µm |
± 10 µm |
± 15 µm |
± 20 µm |
max. |
| Minimum incremental motion in X |
0.1 µm |
0.1 µm |
0.1 µm |
0.1 µm |
0.1 µm |
0.1 µm |
max. |
| Sensor signal |
BiSS-C |
BiSS-C |
BiSS-C |
Sin/cos, 1 V peak-peak |
Sin/cos, 1 V peak-peak |
Sin/cos, 1 V peak-peak |
|
| Sensor resolution |
5 nm |
5 nm |
5 nm |
|
|
|
|
| Sensor signal period |
|
|
|
20 µm |
20 µm |
20 µm |
|
| Limit switches |
|
|
|
Hall effect, N/C contact, 5 V, NPN |
Hall effect, N/C contact, 5 V, NPN |
Hall effect, N/C contact, 5 V, NPN |
|
| Drive Properties |
V-855.556023E0 |
V-855.566023E0 |
V-855.576023E0 |
V-855.556211E0 |
V-855.566211E0 |
V-855.576211E0 |
Tolerance |
| Drive type |
Ironless 3-phase linear motor |
Ironless 3-phase linear motor |
Ironless 3-phase linear motor |
Ironless 3-phase linear motor |
Ironless 3-phase linear motor |
Ironless 3-phase linear motor |
|
| Nominal voltage |
60 V |
60 V |
60 V |
60 V |
60 V |
60 V |
|
| Peak voltage |
60 V |
60 V |
60 V |
60 V |
60 V |
60 V |
|
| Nominal current, RMS |
3.2 A |
3.2 A |
3.2 A |
3.2 A |
3.2 A |
3.2 A |
typ. |
| Peak current, RMS |
7.3 A |
7.3 A |
7.3 A |
7.3 A |
7.3 A |
7.3 A |
typ. |
| Drive force in negative direction of motion in X |
39 N |
39 N |
39 N |
39 N |
39 N |
39 N |
typ. |
| Drive force in positive direction of motion in X |
39 N |
39 N |
39 N |
39 N |
39 N |
39 N |
typ. |
| Peak force in negative direction of motion in X |
90 N |
90 N |
90 N |
90 N |
90 N |
90 N |
|
| Peak force in positive direction of motion in X |
90 N |
90 N |
90 N |
90 N |
90 N |
90 N |
|
| Force constant |
12.4 N/A |
12.4 N/A |
12.4 N/A |
12.4 N/A |
12.4 N/A |
12.4 N/A |
|
| Motor constant |
5.39 N/√W |
5.39 N/√W |
5.39 N/√W |
5.39 N/√W |
5.39 N/√W |
5.39 N/√W |
typ. |
| Time constant |
0.36 ms |
0.36 ms |
0.36 ms |
0.36 ms |
0.36 ms |
0.36 ms |
|
| Resistance phase-phase |
3.5 Ω |
3.5 Ω |
3.5 Ω |
3.5 Ω |
3.5 Ω |
3.5 Ω |
typ. |
| Inductance phase-phase |
1.2 mH |
1.2 mH |
1.2 mH |
1.2 mH |
1.2 mH |
1.2 mH |
|
| Back EMF phase-phase |
10 V·s/m |
10 V·s/m |
10 V·s/m |
10 V·s/m |
10 V·s/m |
10 V·s/m |
max. |
| Pole pitch N-N |
24 mm |
24 mm |
24 mm |
24 mm |
24 mm |
24 mm |
|
| Mechanical Properties |
V-855.556023E0 |
V-855.566023E0 |
V-855.576023E0 |
V-855.556211E0 |
V-855.566211E0 |
V-855.576211E0 |
Tolerance |
| Guide |
Recirculating ball bearing guide |
Recirculating ball bearing guide |
Recirculating ball bearing guide |
Recirculating ball bearing guide |
Recirculating ball bearing guide |
Recirculating ball bearing guide |
|
| Moved mass in X, unloaded |
800 g |
800 g |
800 g |
800 g |
800 g |
800 g |
|
| Permissible push force in Y |
60 N |
60 N |
60 N |
60 N |
60 N |
60 N |
max. |
| Permissible push force in Z |
600 N |
600 N |
600 N |
600 N |
600 N |
600 N |
max. |
| Overall mass |
3800 g |
6800 g |
10500 g |
3800 g |
6800 g |
10500 g |
|
| Material |
Aluminum, black anodized, steel (guide rail)
|
Aluminum, black anodized, steel (guide rail)
|
Aluminum, black anodized, steel (guide rail)
|
Aluminum, black anodized, steel (guide rail)
|
Aluminum, black anodized, steel (guide rail)
|
Aluminum, black anodized, steel (guide rail)
|
|
| Miscellaneous |
V-855.556023E0 |
V-855.566023E0 |
V-855.576023E0 |
V-855.556211E0 |
V-855.566211E0 |
V-855.576211E0 |
Tolerance |
| Connector |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
|
| Sensor connector |
D-sub 15-pole (f) |
D-sub 15-pole (f) |
D-sub 15-pole (f) |
D-sub 15-pole (f) |
D-sub 15-pole (f) |
D-sub 15-pole (f) |
|
| Cable length |
1 m |
1 m |
1 m |
1 m |
1 m |
1 m |
|
| Operating temperature range |
5 to 40 °C |
5 to 40 °C |
5 to 40 °C |
5 to 40 °C |
5 to 40 °C |
5 to 40 °C |
|
| Recommended controllers / drivers |
G-901: G-901.R319, G-901.R3199, G-901.R4199
ACS modular controller
|
G-901: G-901.R319, G-901.R3199, G-901.R4199
ACS modular controller
|
G-901: G-901.R319, G-901.R3199, G-901.R4199
ACS modular controller
|
G-901: G-901.R319, G-901.R3199, G-901.R4199
ACS modular controller
|
G-901: G-901.R319, G-901.R3199, G-901.R4199
ACS modular controller
|
G-901: G-901.R319, G-901.R3199, G-901.R4199
ACS modular controller
|
|