The M-110 ultra-compact micro-translation stage from PI has a resolution of 50 nm.
- Highly compact as a result of folded drive
- XY setups could be mounted directly
- Huge quantities available rapidly
- Variants ideal for vacuum available
- Noncontact reference and limit switches
- Comes with stepper motors and closed-loop DC motors
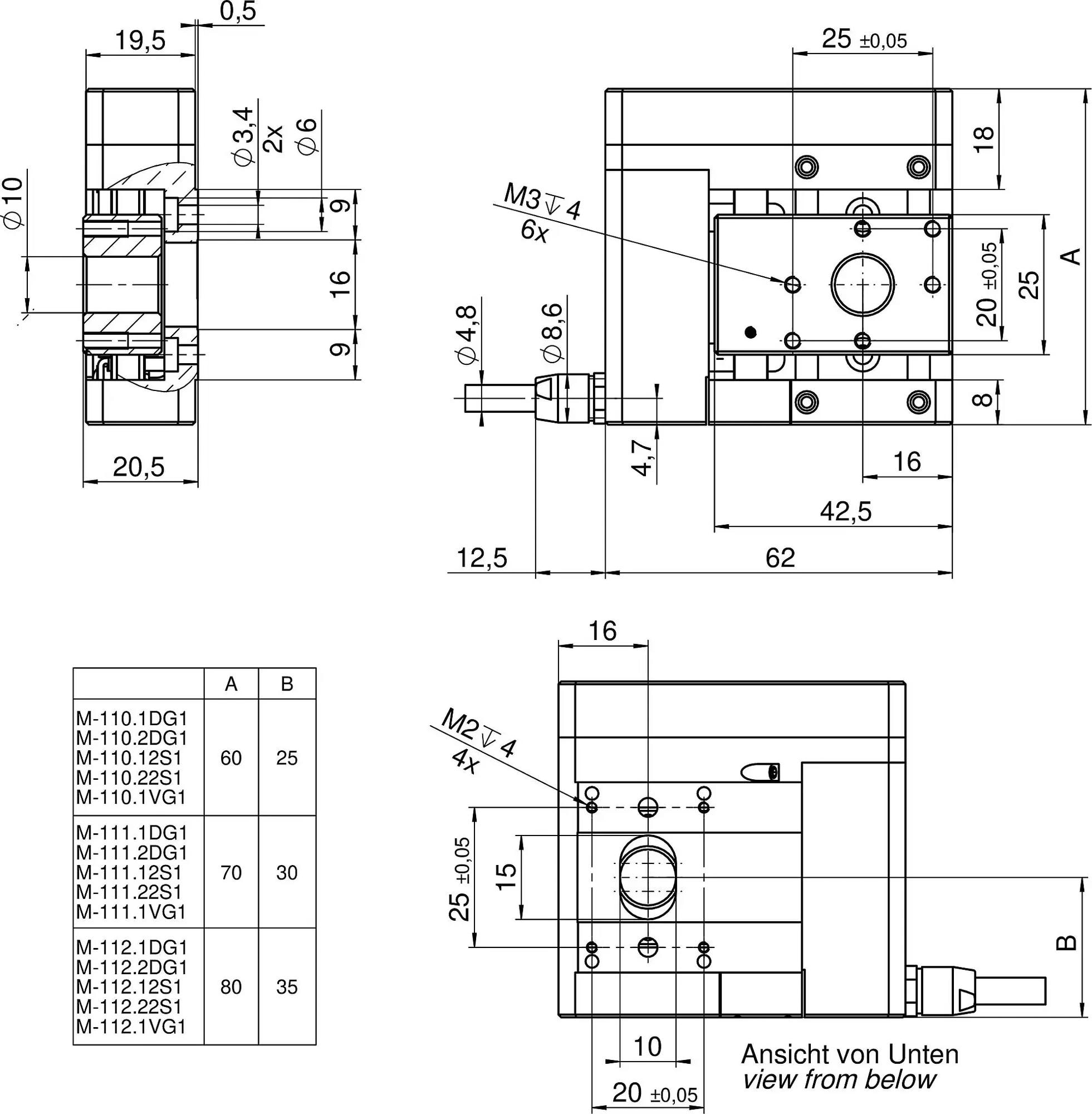
M-11x.xxx1, dimensions in mm. Image Credit: PI (Physik Instrumente) LP

XY setups possible without adapter plate. Image Credit: PI (Physik Instrumente) LP
Product Description
Compact Linear Stage, Versatile in use
Linear stage is available with small size due to the folded drive with belt drive. A clear aperture comes with 10 mm Ø. XY setups can be mounted instantly without an adapter plate.
Drive
- Comes with a 2-phase stepper motor or closed-loop DC gear motor
- Backlash-compensated threaded spindle or ball screw is provided
Position Measuring
- Noncontact Hall effect reference and limit switches
- Variants with DC gear motor: Rotary encoder available on the motor shaft
Application Fields
- Precision micro-assembly
- Laser inscription
- Research
- Automation
- Optical alignment
Specifications
5 mm
Table 1. Source: PI (Physik Instrumente) LP
| Motion |
M-110.1DG1 |
M-110.2DG1 |
M-110.12S1 |
M-110.22S1 |
Tolerance |
| Active axes |
X |
X |
X |
X |
|
| Travel range in X |
5 mm |
5 mm |
5 mm |
5 mm |
|
| Maximum velocity in X, unloaded |
1 mm/s |
1.5 mm/s |
1 mm/s |
1 mm/s |
|
| Positioning |
M-110.1DG1 |
M-110.2DG1 |
M-110.12S1 |
M-110.22S1 |
Tolerance |
| Unidirectional repeatability in X |
0.25 µm |
0.15 µm |
0.25 µm |
0.15 µm |
typ. |
| Bidirectional repeatability in X |
± 2 µm |
± 2 µm |
± 2 µm |
± 2 µm |
typ. |
| Minimum incremental motion in X |
0.05 µm |
0.2 µm |
0.02 µm |
0.2 µm |
typ. |
| Backlash in X |
3 µm |
3 µm |
3 µm |
3 µm |
typ. |
| Reference switch |
Hall effect |
Hall effect |
Hall effect |
Hall effect |
|
| Limit switches |
Hall effect |
Hall effect |
Hall effect |
Hall effect |
|
| Motor encoder |
Incremental rotary encoder |
Incremental rotary encoder |
|
|
|
| Resolution, motor encoder |
2048 Cts./rev. |
2048 Cts./rev. |
|
|
|
| Motor encoder: Sensor signal |
A/B quadrature, RS-422 |
A/B quadrature, RS-422 |
|
|
|
| Drive Properties |
M-110.1DG1 |
M-110.2DG1 |
M-110.12S1 |
M-110.22S1 |
Tolerance |
| Drive type |
DC gear motor |
DC gear motor |
2-phase stepper motor |
2-phase stepper motor |
|
| Nominal voltage |
12 V |
12 V |
|
|
|
| Nominal current, RMS |
0.16 A |
0.16 A |
0.25 A |
0.25 A |
typ. |
| Drive force in negative direction of motion in X |
10 N |
10 N |
10 N |
10 N |
typ. |
| Drive force in positive direction of motion in X |
10 N |
10 N |
10 N |
10 N |
typ. |
| Motor resolution |
|
|
24 Full steps/rev. |
24 Full steps/rev. |
|
| Mechanical Properties |
M-110.1DG1 |
M-110.2DG1 |
M-110.12S1 |
M-110.22S1 |
Tolerance |
| Guide |
Ball guide |
Ball guide |
Ball guide |
Ball guide |
|
| Drive screw type |
Fine-threaded spindle |
Ball screw |
Fine-threaded spindle |
Ball screw |
|
| Drive screw pitch |
0.4 mm |
0.5 mm |
0.4 mm |
0.5 mm |
|
| Gear ratio i |
256 : 9 |
256 : 9 |
256 : 9 |
256 : 9 |
|
| Moved mass in X, unloaded |
11 g |
12 g |
11 g |
12 g |
|
| Permissible push force in Y |
15 N |
15 N |
15 N |
15 N |
max. |
| Permissible push force in Z |
30 N |
30 N |
30 N |
30 N |
max. |
| Permissible torque in θx |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Permissible torque in θY |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Permissible torque in θZ |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Overall mass |
250 g |
250 g |
250 g |
250 g |
|
| Material |
Anodized aluminum |
Anodized aluminum |
Anodized aluminum |
Anodized aluminum |
|
| Holding force in X, passive |
|
|
10 N |
10 N |
|
| Miscellaneous |
M-110.1DG1 |
M-110.2DG1 |
M-110.12S1 |
M-110.22S1 |
Tolerance |
| Connector |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
|
| Recommended controllers / drivers |
C-863
C-884
G-901
G-910
ACS modular controller
|
C-863
C-884
G-901
G-910
ACS modular controller
|
C-663
G-901
G-910
ACS modular controller
|
C-663
G-901
G-910
ACS modular controller
|
|
| Cable length |
0.5 m |
0.5 m |
0.5 m |
0.5 m |
|
| Operating temperature range |
-20 to 65 °C |
-20 to 65 °C |
-20 to 65 °C |
-20 to 65 °C |
|
Note on minimum incremental motion: Values are achieved with the recommended controller
Note on nominal current: Values apply per phase
15 mm
Table 2. Source: PI (Physik Instrumente) LP
| Motion |
M-111.1DG1 |
M-111.2DG1 |
M-111.12S1 |
M-111.22S1 |
Tolerance |
| Active axes |
X |
X |
X |
X |
|
| Travel range in X |
15 mm |
15 mm |
15 mm |
15 mm |
|
| Maximum velocity in X, unloaded |
1.5 mm/s |
2 mm/s |
1 mm/s |
1 mm/s |
|
| Positioning |
M-111.1DG1 |
M-111.2DG1 |
M-111.12S1 |
M-111.22S1 |
Tolerance |
| Unidirectional repeatability in X |
0.25 µm |
0.15 µm |
0.25 µm |
0.15 µm |
typ. |
| Bidirectional repeatability in X |
± 2 µm |
± 2 µm |
± 2 µm |
± 2 µm |
typ. |
| Minimum incremental motion in X |
0.05 µm |
0.2 µm |
0.02 µm |
0.2 µm |
typ. |
| Backlash in X |
3 µm |
3 µm |
3 µm |
3 µm |
typ. |
| Reference switch |
Hall effect |
Hall effect |
Hall effect |
Hall effect |
|
| Limit switches |
Hall effect |
Hall effect |
Hall effect |
Hall effect |
|
| Motor encoder |
Incremental rotary encoder |
Incremental rotary encoder |
|
|
|
| Resolution, motor encoder |
2048 Cts./rev. |
2048 Cts./rev. |
|
|
|
| Motor encoder: Sensor signal |
A/B quadrature, RS-422 |
A/B quadrature, RS-422 |
|
|
|
| Drive Properties |
M-111.1DG1 |
M-111.2DG1 |
M-111.12S1 |
M-111.22S1 |
Tolerance |
| Drive type |
DC gear motor |
DC gear motor |
2-phase stepper motor |
2-phase stepper motor |
|
| Nominal voltage |
12 V |
12 V |
|
|
|
| Nominal current, RMS |
0.32 A |
0.32 A |
0.25 A |
0.25 A |
typ. |
| Drive force in negative direction of motion in X |
10 N |
10 N |
10 N |
10 N |
typ. |
| Drive force in positive direction of motion in X |
10 N |
10 N |
10 N |
10 N |
typ. |
| Motor resolution |
|
|
24 Full steps/rev. |
24 Full steps/rev. |
|
| Mechanical Properties |
M-111.1DG1 |
M-111.2DG1 |
M-111.12S1 |
M-111.22S1 |
Tolerance |
| Guide |
Ball guide |
Ball guide |
Ball guide |
Ball guide |
|
| Drive screw type |
Fine-threaded spindle |
Ball screw |
Fine-threaded spindle |
Ball screw |
|
| Drive screw pitch |
0.4 mm |
0.5 mm |
0.4 mm |
0.5 mm |
|
| Gear ratio i |
256 : 9 |
256 : 9 |
256 : 9 |
256 : 9 |
|
| Moved mass in X, unloaded |
11 g |
12 g |
11 g |
12 g |
|
| Permissible push force in Y |
10 N |
10 N |
10 N |
10 N |
max. |
| Permissible push force in Z |
30 N |
30 N |
30 N |
30 N |
max. |
| Permissible torque in θx |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Permissible torque in θY |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Permissible torque in θZ |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Overall mass |
270 g |
270 g |
270 g |
270 g |
|
| Material |
Anodized aluminum |
Anodized aluminum |
Anodized aluminum |
Anodized aluminum |
|
| Holding force in X, passive |
|
|
10 N |
10 N |
|
| Miscellaneous |
M-111.1DG1 |
M-111.2DG1 |
M-111.12S1 |
M-111.22S1 |
Tolerance |
| Connector |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
|
| Recommended controllers / drivers |
C-863
C-884
G-901
G-910
ACS modular controller
|
C-863
C-884
G-901
G-910
ACS modular controller
|
C-663
G-901
G-910
ACS modular controller
|
C-663
G-901
G-910
ACS modular controller
|
|
| Cable length |
0.5 m |
0.5 m |
0.5 m |
0.5 m |
|
| Operating temperature range |
-20 to 65 °C |
-20 to 65 °C |
-20 to 65 °C |
-20 to 65 °C |
|
Note on minimum incremental motion: Values are achieved with the recommended controller
Note on nominal current: Values apply per phase
25 mm
Table 3. Source: PI (Physik Instrumente) LP
| Motion |
M-112.1DG1 |
M-112.2DG1 |
M-112.12S1 |
M-112.22S1 |
Tolerance |
| Active axes |
X |
X |
X |
X |
|
| Travel range in X |
25 mm |
25 mm |
25 mm |
25 mm |
|
| Maximum velocity in X, unloaded |
1.5 mm/s |
2 mm/s |
1 mm/s |
1 mm/s |
|
| Positioning |
M-112.1DG1 |
M-112.2DG1 |
M-112.12S1 |
M-112.22S1 |
Tolerance |
| Unidirectional repeatability in X |
0.25 µm |
0.15 µm |
0.25 µm |
0.15 µm |
typ. |
| Bidirectional repeatability in X |
± 2 µm |
± 2 µm |
± 2 µm |
± 2 µm |
typ. |
| Minimum incremental motion in X |
0.05 µm |
0.2 µm |
0.02 µm |
0.2 µm |
typ. |
| Backlash in X |
3 µm |
3 µm |
3 µm |
3 µm |
typ. |
| Reference switch |
Hall effect |
Hall effect |
Hall effect |
Hall effect |
|
| Limit switches |
Hall effect |
Hall effect |
Hall effect |
Hall effect |
|
| Motor encoder |
Incremental rotary encoder |
Incremental rotary encoder |
|
|
|
| Resolution, motor encoder |
2048 Cts./rev. |
2048 Cts./rev. |
|
|
|
| Motor encoder: Sensor signal |
A/B quadrature, RS-422 |
A/B quadrature, RS-422 |
|
|
|
| Drive Properties |
M-112.1DG1 |
M-112.2DG1 |
M-112.12S1 |
M-112.22S1 |
Tolerance |
| Drive type |
DC gear motor |
DC gear motor |
2-phase stepper motor |
2-phase stepper motor |
|
| Nominal voltage |
12 V |
12 V |
|
|
|
| Nominal current, RMS |
0.32 A |
0.32 A |
0.25 A |
0.25 A |
typ. |
| Drive force in negative direction of motion in X |
10 N |
10 N |
10 N |
10 N |
typ. |
| Drive force in positive direction of motion in X |
10 N |
10 N |
10 N |
10 N |
typ. |
| Motor resolution |
|
|
24 Full steps/rev. |
24 Full steps/rev. |
|
| Mechanical Properties |
M-112.1DG1 |
M-112.2DG1 |
M-112.12S1 |
M-112.22S1 |
Tolerance |
| Guide |
Ball guide |
Ball guide |
Ball guide |
Ball guide |
|
| Drive screw type |
Fine-threaded spindle |
Ball screw |
Fine-threaded spindle |
Ball screw |
|
| Drive screw pitch |
0.4 mm |
0.5 mm |
0.4 mm |
0.5 mm |
|
| Gear ratio i |
256 : 9 |
256 : 9 |
256 : 9 |
256 : 9 |
|
| Moved mass in X, unloaded |
11 g |
12 g |
11 g |
12 g |
|
| Permissible push force in Y |
10 N |
10 N |
10 N |
10 N |
max. |
| Permissible push force in Z |
20 N |
20 N |
20 N |
20 N |
max. |
| Permissible torque in θx |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Permissible torque in θY |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Permissible torque in θZ |
0.15 N·m |
0.15 N·m |
0.15 N·m |
0.15 N·m |
max. |
| Overall mass |
300 g |
300 g |
300 g |
300 g |
|
| Material |
Anodized aluminum |
Anodized aluminum |
Anodized aluminum |
Anodized aluminum |
|
| Holding force in X, passive |
|
|
10 N |
10 N |
|
| Miscellaneous |
M-112.1DG1 |
M-112.2DG1 |
M-112.12S1 |
M-112.22S1 |
Tolerance |
| Connector |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
HD D-sub 26-pin (m) |
|
| Recommended controllers / drivers |
C-863
C-884
G-901
G-910
ACS modular controller
|
C-863
C-884
G-901
G-910
ACS modular controller
|
C-663
G-901
G-910
ACS modular controller
|
C-663
G-901
G-910
ACS modular controller
|
|
| Cable length |
0.5 m |
0.5 m |
0.5 m |
0.5 m |
|
| Operating temperature range |
-20 to 65 °C |
-20 to 65 °C |
-20 to 65 °C |
-20 to 65 °C |
|
Note on minimum incremental motion: Values are achieved with the recommended controller
Note on nominal current: Values apply per phase