The National Institute of Standards and Technology (NIST) conducted three robotics contests to demonstrate the viability of latest microrobotics and robotics technologies at the IEEE International Conference on Robotics and Automation (ICRA) in China.
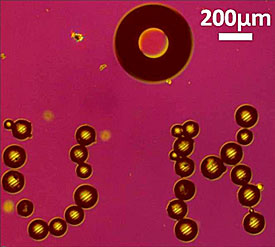 A photomicrograph showing the microrobot built by the University of Hawaii along with a series of glass beads that it assembled into a mini U H
A photomicrograph showing the microrobot built by the University of Hawaii along with a series of glass beads that it assembled into a mini U H
During the first half of the Virtual Manufacturing Automation Competition (VMAC), the participants made use of open-source evaluation equipment to work out a computer plan for enabling a robot to pick up boxes of different weights and sizes from a conveyor belt and to place them on a pallet for transportation. In the second half of the competition, participants used off-the-shelf computer gaming software to run simulations that virtually tested the robot’s capability to fill trucks with pallets supplied from a warehouse.
Seven teams from countries such as Europe, Canada and the United States took part in the Mobile Microrobotics Challenge (MMC) with their miniature robots that had dimensions in the order of micrometers. The teams had to deploy their mini-sized robots to fight against each other. During the mobility contest, the microbots had to steer its way through a two-dimensional maze as small as a sesame seed.
In the microassembly contest, the participating teams had to work in a narrow channel with multiple microscale parts to simulate dual applications such as assembly-based micro manufacturing and futuristic microbots to perform operation within a blood vessel. The Waterloo robot was the winner in the microassembly contest packing densely triangular shaped components of length 45 µm