.jpg) By Pritam RoyReviewed by Susha Cheriyedath, M.Sc.Nov 7 2022
By Pritam RoyReviewed by Susha Cheriyedath, M.Sc.Nov 7 2022In an article published in the journal Nature Nanotechnology, researchers presented single fibers and bundles with vast and powerful contractive actuation inspired by mammalian skeletal muscle. Future robotics that can replicate complex movements of living systems should include artificial muscles as essential components. However, a precise mix of actuation properties, such as stress, strain, high mechanical strength, and energy density, is needed for their practical applications.

Study: Human-muscle-inspired single fibre actuator with reversible percolation. Image Credit: piccreative/Shutterstock.com
In a uniaxial liquid crystalline matrix, exfoliated graphene fillers were used to create photothermal actuation with a high work capacity and quick reaction. Additionally, electrical switching was used in situ to monitor the reversible percolation of the graphene filler caused by the thermodynamic conformational transformation of mesoscale structures.
This dynamic percolation behavior efficiently reinforced the mechanical characteristics of the actuator fibers, especially in the contracted actuation phase, allowing robust reversible actuation like that of mammalian muscle. Smart actuators can easily be incorporated into strong bundles and high-power soft robotics using light-driven remote control owing to a mechanically compliant fiber system.
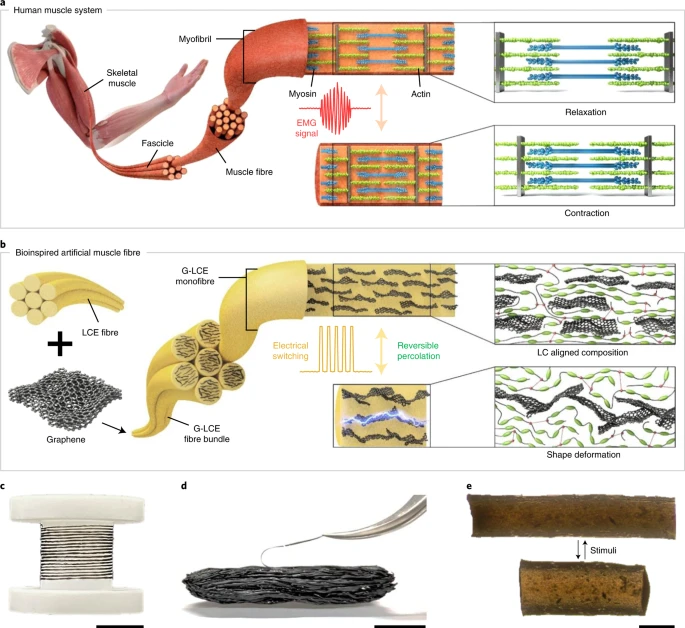
Human-muscle-like artificial muscle fibre. a, Structural organization and actuation mechanism of skeletal muscle consisting of myofibrils. b, Schematic of a G-LCF composite fibre for shape deformation mechanism with reversible percolation. c, Continuous G-LCF composite fibre wound over a reel. d, Animal-tissue-like 1,000 strand bundled structure of G-LCF artificial muscle fibres. e, Optical microscopy of relaxed and contracted states of G-LCF. Scale bars, 2 cm (c), 1 cm (d) and 200 μm (e). Image Credit: Kim, I. H et al., Nature Nanotechnology
Realizing the Reversible Percolation Driven Fiber Type Actuator
The next generation of soft robotics smart clothing, implanted medical reinforcements, bioinspired systems, and other applications can significantly benefit from artificial muscles that repeatedly cycle through dimensional or geometric modulation in response to external stimuli. Among various actuation features for artificial muscle, stimuli-responsive polymer-based structures with high elasticity, lightweight, and controlled processability are anticipated to solve the inherent restrictions of conventional pneumatic and hydraulic actuators.
However, these polymeric materials with significant macroscopic shape change frequently experience weak mechanical characteristics. Thus, composite structures combining rigid fillers and tailored polymer matrices are gaining study focus to attain excellent mechanical features, concurrent massive actuation deformation, and other capabilities.
Yet, a viable artificial muscle system must have a desirable mix of actuation characteristics, such as stress, strain, power, or energy density. Also, dependable mechanical strength is necessary to withstand a significant external load in both the actuated and relaxed phases.
Actin and myosin, the two constituent proteins of myofibrils, are linearly shortened in human muscles while the lengths of the proteins remain constant. The fluctuation in action potential produces an electromyography (EMG) signal frequently used in clinical and biological applications to identify muscular activity.
Liquid crystal elastomers (LCEs) were used in the proposed synthetic muscle fiber as a large-strain reversible actuation matrix controlled by the thermodynamic conformational transition of the flexible polymer-chain segments between the isotropic (or paranematic) and nematic phases. Unfortunately, the intrinsically weak mechanical characteristics and delayed thermal relaxation of pure LCE actuators limited their actuation power and reaction time.
It was established that significant p-p interactions and hydrogen bonding caused liquid crystalline (LC) moieties to spontaneously self-assemble on the graphene surface. One-dimensional fiber geometry and the strong binding of LC moieties to the graphene surface allowed fine control of the macroscopic alignment, amplifying the mechanical properties. It also preserved the accurate large reversible actuation of around 45 percent. In addition, graphene fillers promoted quick actuation when exposed to near-infrared (NIR) radiation due to the inherent photothermal effect.
The resulting actuation performance achieved power density and work capacity of 293 watts per kilogram and 650 joules per kilogram, respectively. These results were around 17 and six times that of the actions of the human muscle. Additionally, it was simple to build several soft muscle fiber strands into hierarchical bundles that imitated successively gathered muscular tissues, such as skeletal muscle, fascicles, and muscle fibers made of myofibrils.
Electrical measurement showed that the reversible assembly and disassembly of the highly anisotropic graphene filler network was induced in the fiber-axis direction of the substantially sizeable contractive actuation and recovery in one-dimensional fiber confinement. Additionally, to ensure mechanical endurance throughout the actuation cycle without interfering with the significant dimensional change in relaxation and actuation, the reversible reconfiguration of the percolation network overcame the inherent mechanical failure of the actuator fiber in the contracted actuated state.
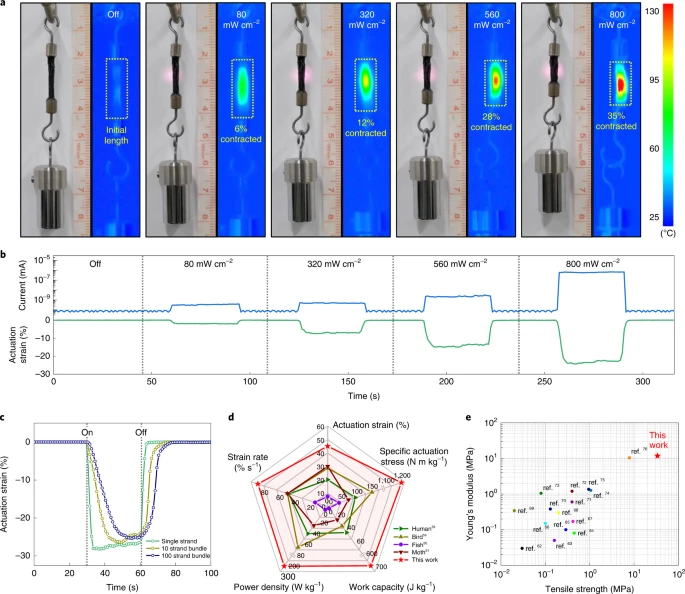
Rapid photothermal actuation of G-LCFs. a, Photoactuation and corresponding surface temperature variation in 100 strand G0.3-LCF bundle suspending 10 g weight subjected to NIR irradiation (λ = 808 nm) at room temperature. b, Actuation strain and concurrent electrical current change at the single-fibre level of G0.3-LCF induced by different NIR intensities under a constant stress (1.5 MPa). c, Contraction strains for different strands of G0.3-LCF in response to NIR irradiation (800 mW cm-2) under a constant stress (1.5 MPa). d, Comparison plot in terms of specific actuation stress, actuation strain, strain rate, work density and power density with natural biological muscles. e, Comparison of our actuator fibre with previous LCE-based actuators in terms of tensile strength and Young’s modulus in the contracted actuation states. Image Credit: Kim, I. H et al., Nature Nanotechnology
Proof-of-Concept Experiments
The authors improved the direct melt spinning of LCE fibers (LCF) with or without fillers made of graphene. Using incredibly crystalline electrochemically exfoliated graphene (EG) fillers achieved strong mechanical characteristics and excellent electrical conductivity.
Across the LCE's nematic-paranematic transition temperatures (Tnp), uniaxially aligned graphene LCE fiber (G-LCF) showed reversible linear contractive dimensional change. Initial verification of the nematic LC texture was achieved by polarised optical microscopy (POM), which turned paranematic with contraction.
A uniaxial cyclic loading analysis using a dynamic mechanical analyzer with a constant stress of one megapascal was used to assess the close intermolecular contacts between EG fillers and the LCE matrix. With EG loading, the resilience of the G-LCFs became more prominent, as shown by the sharp decline in hysteresis and the swift rise in Young's modulus.
Broadband absorbance and sp2-hybridized carbon lattice vibration-based thermal dissipation made graphene a good photothermal converter. The nematic-paranematic phase transition in nearby LCE matrices inside the thin fiber geometry was induced by the photothermal heating of EG fillers, which enabled a site-specific remote-controlled actuation.
G-LCFs installed upon the tension clamp of a dynamic mechanical analyzer with a constant strain of three percent were immediately exposed to a NIR laser for quantitative investigation of photothermal actuation. Although the actuation stress improved with EG content, all G-LCF single fibers showed quick actuation. The NIR intensity and actuation stress also displayed a proportional correlation.
The proposed synthetic muscles' adaptable single-fiber design enabled substantial flexibility for complicated actuating body morphing. Also, the palm and fingers of the artificial hand were created by adding single-fibril muscles to a specially designed graphene film.
Each finger was remotely controlled for selective bending and straightening with a short operation time of less than one second. Finally, the electrical conductivity was measured in situ. Additionally, the suggested fiber actuator could easily be woven with traditional cotton yarns to provide various smart textiles.
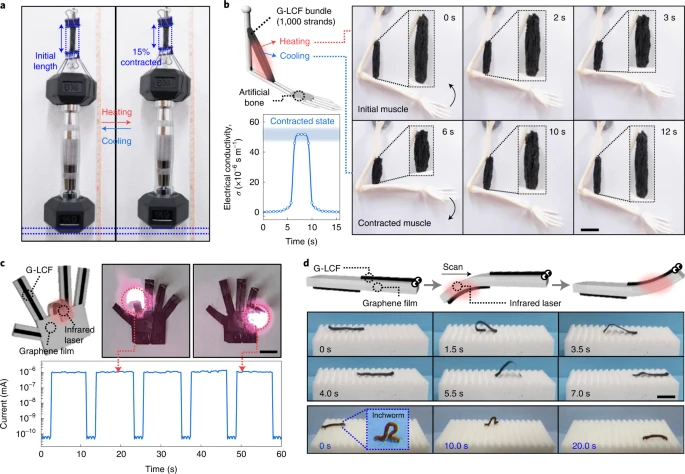
Demonstration of artificial-muscle-based customized actuators. a, A 1,000 strand bundle of G0.3-LCF lifting a 1 kg dumbbell via thermal actuation. b, Reversible actuation of animal-tissue-like artificial muscle bundle (1,000 strands) attached between an artificial human joint along with the corresponding electrical conductivity variation. c, Artificial finger operation under NIR remote control with electrical current variation. d, Biomimetic self-walking of all-carbon artificial worm driven by NIR manipulation. The natural movement of an alive inchworm for comparison. Scale bars, 2 cm (b) and 1 cm (c and d). Image Credit: Kim, I. H et al., Nature Nanotechnology
Artificial Muscles and the Future of Robotics
In this work, the authors discussed synergistic material design that exploited molecular intimacy to produce bundles and filaments of actuators resembling human muscle. They also realized the optimum combination of actuation characteristics needed for practical application.
Notably, the reversible percolation of graphene fillers that was accompanied by the actuation made it simple to monitor the behavior of the actuation. It also selectively enhanced the mechanical efficiency under substantial contraction to guarantee reliable locomotion and biomimetic actuation.
An intriguing platform with broad applicability for (i) smart clothing, (ii) implantable muscular reinforcements, (iii) reconfigurable Internet of Things devices, (iv) humanoid robotics, and other emerging technologies was made possible by the high degree of freedom in tailoring high-energy synthetic actuation modes.
Reference
Kim, I. H et al. (2022). Human-muscle-inspired single fibre actuator with reversible percolation. Nature Nanotechnology. https://www.nature.com/articles/s41565-022-01220-2
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.