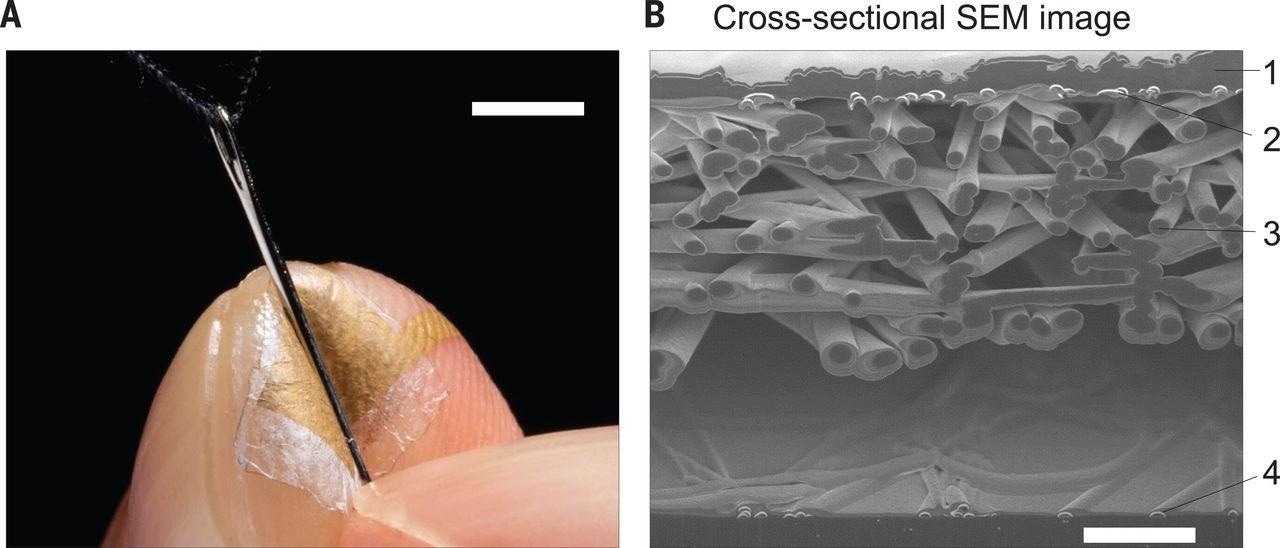
 (A) Nanomesh pressure sensor attached to an index finger. Scale bar, 5 mm. (B) Cross-sectional SEM image of the nanomesh sensor laminated on polyimide film at a tilt angle of 52°. The sensor consists of four layers: a polyurethane nanomesh–embedded passivation layer (1), a top Au nanomesh electrode layer (2), a parylene-coated polyurethane nanomesh intermediate layer with an air gap (3), and a bottom Au nanomesh electrode layer (4). The surface of the sensor is covered by a protective layer during the SEM observation. Scale bar, 5 μm. Image Credit: Lee. S., Franklin. S., Hassani. F. A., et al, [2020]
(A) Nanomesh pressure sensor attached to an index finger. Scale bar, 5 mm. (B) Cross-sectional SEM image of the nanomesh sensor laminated on polyimide film at a tilt angle of 52°. The sensor consists of four layers: a polyurethane nanomesh–embedded passivation layer (1), a top Au nanomesh electrode layer (2), a parylene-coated polyurethane nanomesh intermediate layer with an air gap (3), and a bottom Au nanomesh electrode layer (4). The surface of the sensor is covered by a protective layer during the SEM observation. Scale bar, 5 μm. Image Credit: Lee. S., Franklin. S., Hassani. F. A., et al, [2020]
A more sensitive e-skin that can replicate the qualities of our skin could improve the lives of patients with a diverse range of medical issues and boost the performance of machines performing delicate tasks.
As advancements in artificial limbs and prosthetics grow, so too does the demand for automated machinery that can perform sensitive tasks such as surgery. Both of these fields require the development of a better 'sense' of touch and capabilities resembling that of human skin in electronic skins (e-skins). A duo of new studies published in the journals Science introduces materials that could massively improve electronics' capability to replicate the human sense of touch provided by skin.
This is no small task. Skin is the human body's largest sensory organ containing a tremendous number of mechanoreceptors and thermoreceptors — sensing deformation and temperature, respectively — with an abundance of neurons that continually monitor stimuli and continuously stream this information to the brain.
The ultimate aim for e-skins goes further than just the emulation of a sense of touch, however. Researchers also seek to replicate other properties such as stretchability and toughness and self-healing. In this way, e-skins can act as a true alternative to human skin as part of a human-machine interface.
Making E-Skins Thin but Dense and Sensitive but Tough
There's a desirable caveat that e-skins must meet, wearing one shouldn't interfere with a user's natural skin sensation. This means crafting a device that is both incredibly thin, whilst also having a high-density of sensors.
In addition to this, an e-skin must be tough enough to resist rubbing and repeated physical action, whilst still being thin enough to not interfere with the wearer's natural sense of touch. It's an area where many current e-skins fail, as the sensor arrays that comprise them also make them thick and bulky.
The task of tackling this seeming contradictory blend of qualities was undertaken by Takao Someya, Sunhoon Lee, and a team at the University of Tokyo. They used a process known as electrospinning to create a sensor that is thin and porous, but still tough enough to withstand repeated mechanical actions¹.
The sensor, based upon a design put forward by Akihito Miyamoto in 2017, is comprised of two-layers. The first, an insulating mesh-like network comprising polyurethane fibers around 200 to 400 nm thick. The second comprises the sensor's electronic element, a parallel plate capacitor made of gold just 13 microns thick. To put this in perspective, a visible particle of dust is 25 microns thick. This wonder of nanotechnological engineering is built on a supporting scaffold of a polymer — polyvinyl alcohol (PVA) a water-soluble substance — that the team could wash away, leaving behind just the gold structure molded on it.
It's the interaction between these layers that allows the sensor to detect pressure. When a finger coated with the sensor touches an object the first layer is deformed This results in a change in capacitance between the mesh and the second layer — the gold capacitor.
The sensor demonstrated itself to be fairly robust, compressing it 1000 times resulted in a capacitance changing by just 0.15%. Likewise, it resisted rubbing with an object fairly well, only breaking after 300 cycles and remaining sensitive throughout the 'rubbing process.'
The team also found that in tests with 18 participants that the sensor could measure pressures akin to that of a bare finger. The test subjects reported that the sensors did not interfere with their natural grip or sensitivity, finding them imperceptible, say the team.
Improving Sensitivity
Whilst Someya, Lee, and their crew tackled the material qualities of an improved e-skin, Insang You, Pohang University of Science and Technology (POSTECH), South Korea, and his colleagues attempted to solve another problem in the field. Namely, how to detect temperature and strain independently.
There are two problems with imitating this natural ability of our skin. Firstly, using different types of receptors to register these separate inputs results in a high-density array of sensory 'pixels' of different types with a complex structure that presents a sizable manufacturing problem. Alternatively, the same sensor can be used to pick up these different signals — referred to as a 'multimodal' sensor — but current methods of doing this create signal interference that severely deteriorates the e-skin's performance.
The POSTECH team formulated a deformable receptor film that uses a process known as ion relaxation dynamics to produce readings of detecting different physical quantities without signal interference, an approach called decoupled multimodal sensing. They used an elastomer mixed with an ionic liquid as an ion conductor to decouple measurements of temperature and strain, respectively. The team then created what they term an IEM-skin consisting of an array of these conductors by sealing them between two layers of stretchable electrode strips.
During testing, the IEM-skin performed decoupled, real-time measurement of strain, and temperature with a high degree of accuracy, and the researchers hope that it can serve as a human-machine interface that allows the user to identify different tactile inputs, allowing its integration into both prosthetic and robotic devices.
Once More with Feeling
Both papers point to impressive developments in the improvement of e-skin thus presenting the capability to restore touch and other sensations to patients with nerve damage or lost limbs. Each study offers new solutions to existing technology whilst also providing a simplified device structure and enhanced sensing performance. This is all delivered without impacting natural sensation.
These results will inspire new sensor designs and lead to applications of e-skins as wearable health care monitoring, sensory prosthetic and robotic devices, and high-performance human-machine interfaces.
Xinyu Liu, Associate Professor, The University of Toronto
References
¹ Lee. S., Franklin. S., Hassani. F. A., et al, [2020], 'Nanomesh pressure sensor for monitoring finger manipulation without sensory interference,' Science, DOI: 10.1126/science.abc9735
² You. I., Mackanic. D. G., Matsuhisa. N., et al, [2020], 'Artificial multimodal receptors based on ion relaxation dynamics,' Science, DOI: 10.1126/science.aba5132
³ Liu. X., [2020], 'The more and less of electronic-skin sensors,' Science, DOI: 10.1126/science.abe7366
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.